
 产品:66
产品:66
 联系我们
联系我们

四轴码垛:ABB IRB 360-6/1600、ABB IRB 360-8/1130、ABB IRB 460-110/2.4 、ABB IRB 660-180/3.15、ABB IRB 660-250/3.15
焊接领域:ABB IRB 1410-5/1.45、ABB IRB 1520ID、ABB IRB 1660ID-4/1.55、ABB IRB 1660ID-6/1.55、ABB IRB 2600ID-15/1.85、
通用型:ABB IRB 120-3/0.6、ABB IRB 1200-5/0.9、ABB IRB 1200-7/0.7、ABB IRB 1600-6/1.2、ABB IRB 4600-60/2.05、ABB IRB 4600-40/2.55、ABB IRB 6700-150/3.2、ABB IRB 6700-200/2.60、ABB IRB 6700-155/2.85
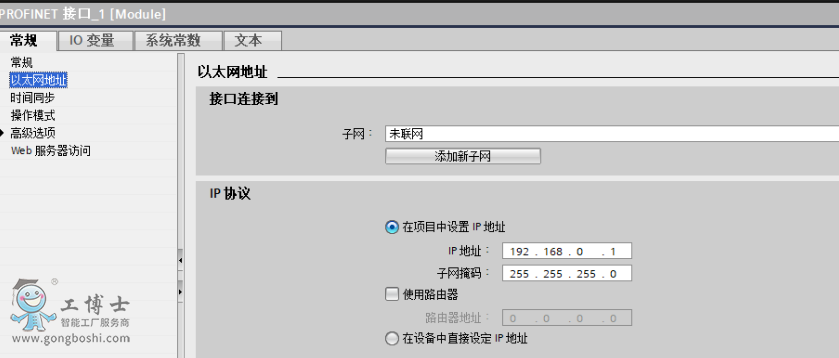
打开PLC软件,添加一款PLC并点击PLC的打开属性界面-以太网地址,设置地址为192.168.0.1。
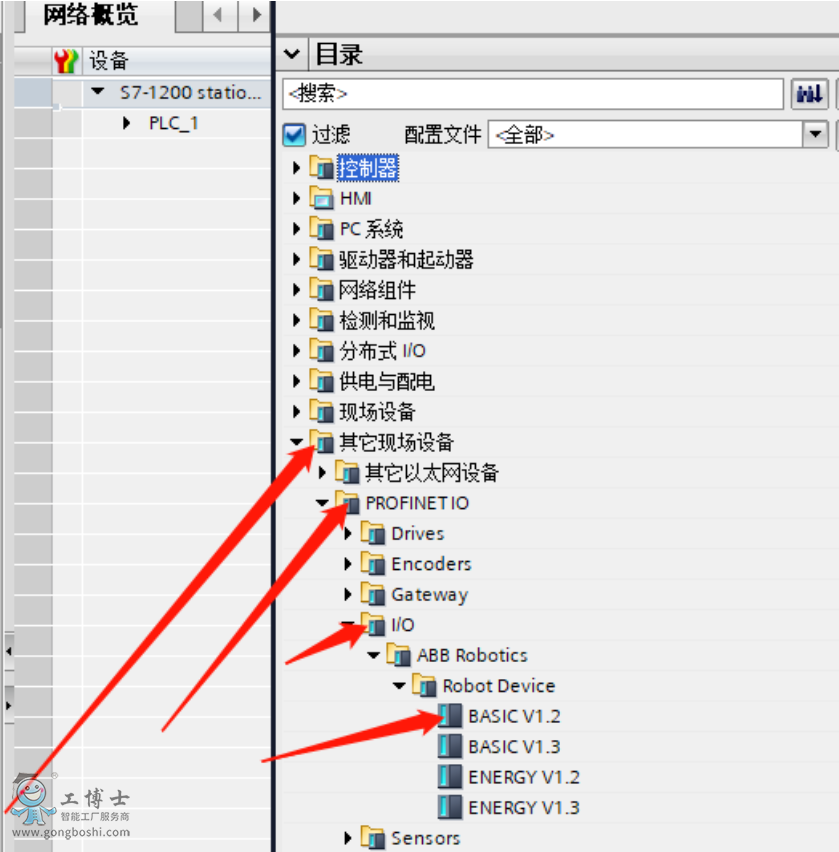
GSD文件可以从机器人示教器中查找,也可以从ABB售后或者其他渠道找对相对应ABB系统版本的GSD文件。
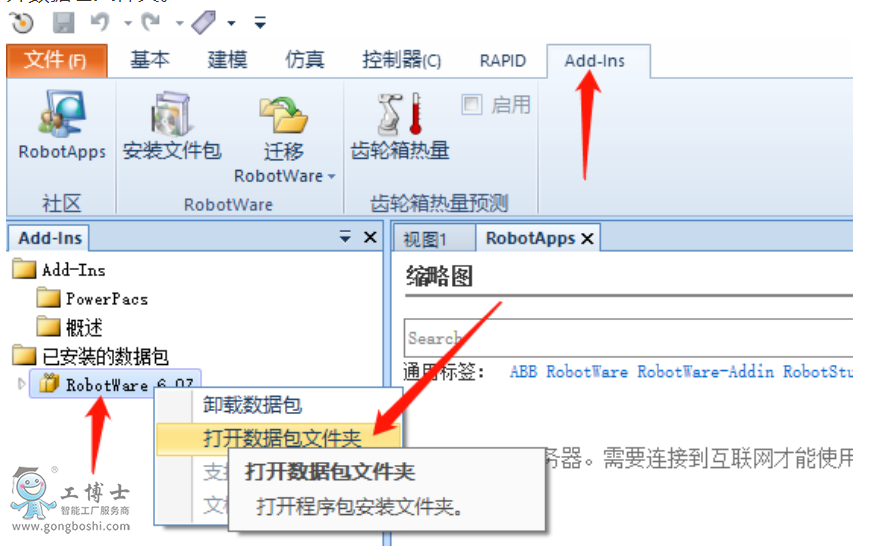
选择Add-Ins选项卡,右键已安装的数据包里面的6.0X系统,在下拉菜单中选择打开数据包文件夹。
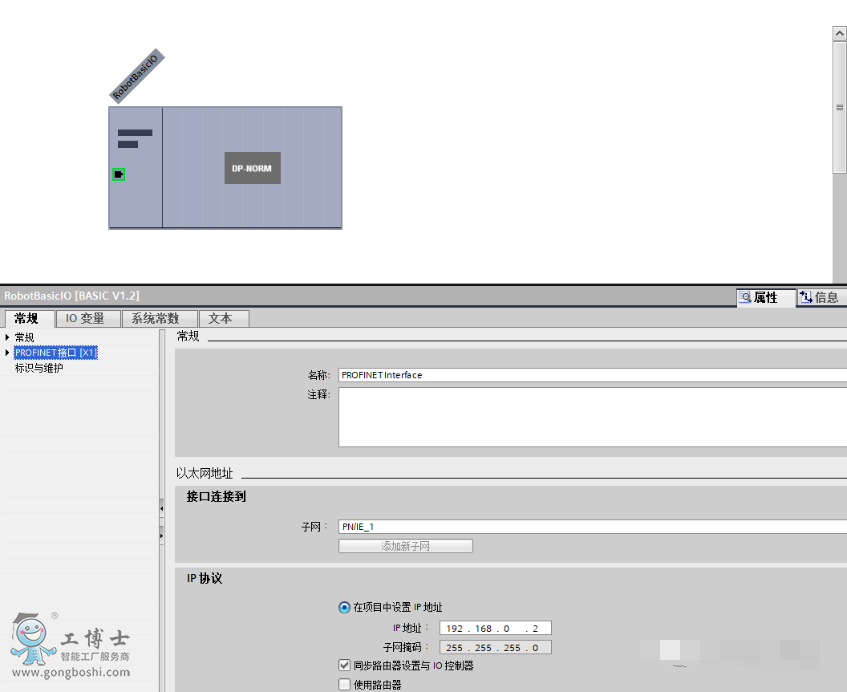

打开控制面板,点击配置,找到主题communication,IP setting,显示全部,ProfiNet work,编辑,设置对应IP地址192.168.10.2

侵权删
更多机器人资讯请咨询:ABB机器人

