
 产品:66
产品:66
 联系我们
联系我们

2)上述情况下,示教与机器人主站之间未建立通信连接
a)检查主机是否正常,检查主机内sd卡是否正常。川
以上版本(包含robotware6)的主机是sd卡,在以下主机的右侧陈
从示教到主机的网络端口都是主机绿色标签网络端口。
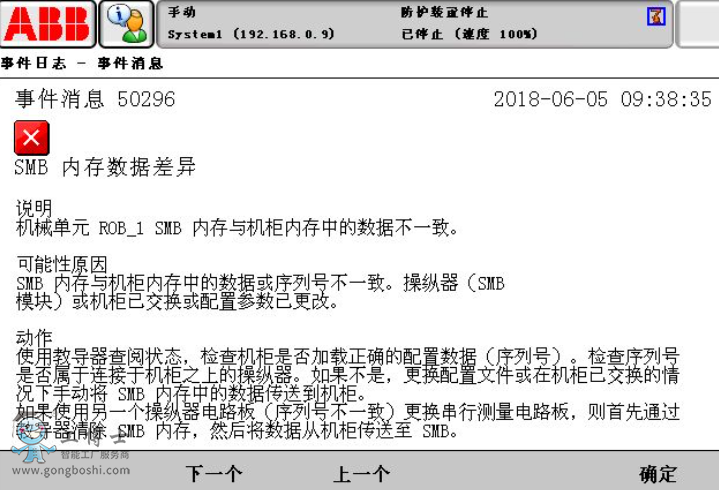
处理方法:以上SMB更换后,SMB内数据与控制盘内数据不一致川
3)选择清除SMBSMB,更换控制器卡时,选择柜存储器的清除)
1)将机器人手动移动至各轴刻度线(现场不能同时到达零刻度线时,可使用1轴1轴)
3)通过实际点击更新(更新时不需要示教Enable)
处理方法:确认机器人控制盘下的x2至机器人本体的SMB线是否连接
正确的关机方式不是直接关机,而是进入ABB,重新启动,选择高度,选择关机。
1)将主体6个马达的温度控制线串联连接,然后连接接触器板(库内左侧的A43)的x5销
2)某轴的温度过高,可以切断热电,打开马达盖进行检查。
3)马达不热或温度控制线断开时,也可以将A43接触器版的x5的1和2暂时短连接
上述问题是驱动对应马达的动力线没有正确连接(上图表示4轴)
A41是驱动,X11是1轴输出,X12是2轴输出,X13是3轴输出,X14是4轴输出,X15是5轴输出,X16是6轴输出
5)以上错误为接触器辅助触点故障(或对应接线故障)
2)如果确实发生冲突,可以暂时关闭撞击监视,慢慢移动机器人
4)如果机器人没有撞到,仍报告该错误,怀疑马达锁定未打开
5)确认触头版附近的K44和K42k43的快门控制线是否通过,线编号如下。
2)如果确实发生冲突,可以暂时关闭撞击监视,慢慢移动机器人
4)如果机器人没有撞到,仍报告该错误,怀疑马达锁定未打开
5)确认触头版附近的K44和K42k43的快门控制线是否通过,线编号如下。
以上内容来源于:网络
侵权删
更多机器人资讯请咨询:ABB机器人

