
 产品:66
产品:66
 联系我们
联系我们

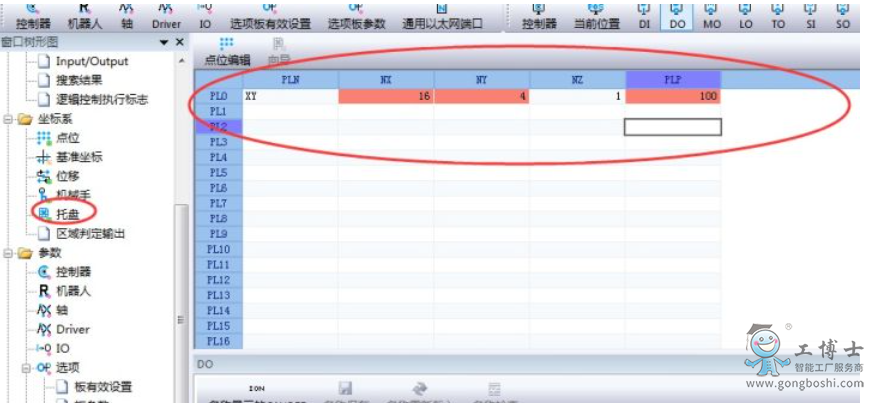
1、托盘指令(以ABB机器人 910SC为例):
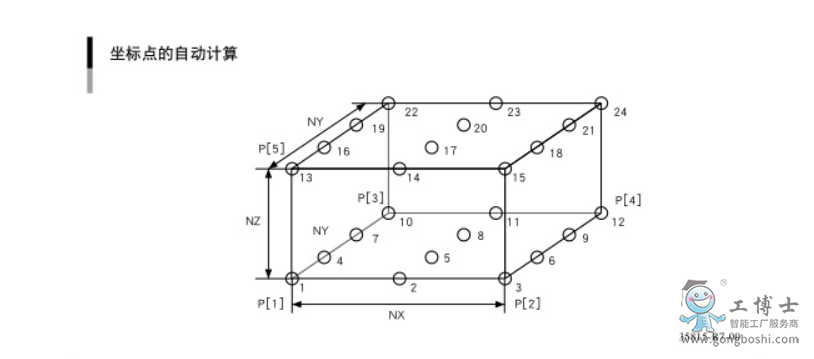
XY为平面方向(YZ,ZX分别为3D的其他面),PLP为设定的4个角的点位首位地址(比如设置100,就是从从P100开始的四个点坐标)
设置好托盘模式,以及示教好4个点P1P2P3P4的坐标,执行:PMOVE (1, 16) ............................. 主机器人轴从当前位置向托盘定义编号 1 的托盘位置编号 16 中指定的位置移动
MOVE P,P1,Z=0,
从当前位置先移动到Z的赋值,这里为0,就是A3的Z轴先走到0,然后移动到P1点的XY,后是P1的Z轴点位,起来的话可以再用一个MOVE P,P2,Z=0,可以用于直上直下的门字形动作了。
3、HOLD 暂停指令
当执行到这个语句时,程序在下一句开始前暂停,如果上一句是执行MOVE,也会暂停
4、DRIVEI 单轴移动指令
单轴独立运动,DRIVEI (1, 10000), STOPON DI (20) =1................................ 第 1 轴从当前位置向 +10000 脉冲位置移动,如果中途 DI (20) =1 的条件成立,则停止移动并执行下一个步骤。
5、机械手安全区域的设定:


以上内容来源于:网络
侵权删
更多机器人资讯请咨询:ABB机器人

